HUMAN FINGURE PROTYPE
LEARN ABOUT
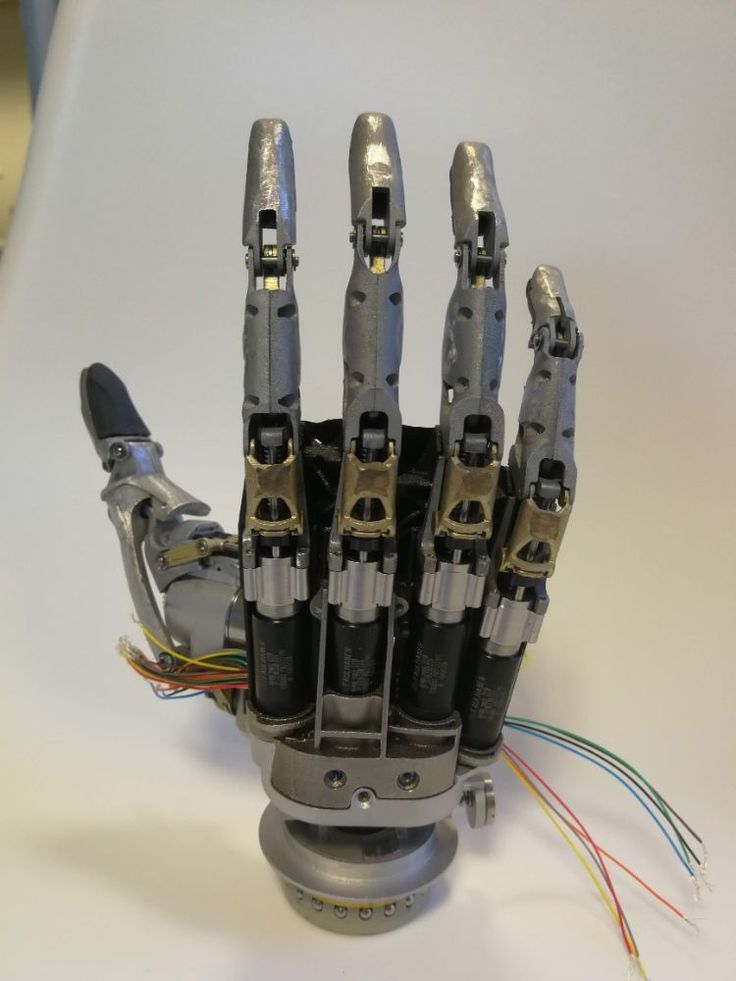
Introduction to Human Finger Prototype – Overview, Applications, and Importance in Robotics
Mechanical Components – Joints, Links, Servos, Actuators, and Finger Structure Design
Sensors – Flex Sensors, Force Sensors, and Position Feedback Systems
Microcontroller Basics – Arduino, Raspberry Pi, or Other Controllers for Finger Movement
Circuit Design & Wiring – Connecting Sensors, Servos, and Microcontroller
Programming – Controlling Finger Movement, Sensor Data Processing, and Actuation Logic
Kinematics of Finger Movement – Understanding Joint Angles, Motion, and Range of Motion
Testing & Troubleshooting – Ensuring Sensor Accuracy, Servo Response, and Prototype Reliability
Advanced Features – Gripping Mechanism, Multi-Finger Coordination, and Object Interaction
Future Trends – AI Integration, Robotic Hands, Prosthetics, and Human-Robot Interaction